1.4. Приборы
Для проведения гидрометеорологических наблюдений с борта судна оно должно быть оснащено определённым специальным оборудованием, которое определено в различных правилах и руководствах, включая РД 52.04.585-97.
Итак, для проведения наблюдений на судне должны быть установлены:
- Барометр-анероид или морской ртутный барометр;
- Психрометр с сухим или смоченным термометрами;
- Барограф (предпочтительно с крупной школой ленты)
- Термометр для измерения морской (забортной) воды;
- Анемометр для измерения силы ветра;
- Ветрочет для вычисления направления и истинной скорости ветра по данным измерения скорости и направление кажущегося ветра;
- Осадкомер, если возможно его использование на борту судна.
В своей практике проведения исследований мы использовали специальные приборы, различные современные источники метеоинформации, а также визуальную оценку.
Для измерения атмосферного давления использовался барометр, для барической тенденции – барограф, для температуры воздуха – термометр и системы электронного картографирования, для измерения скорости и направления ветра – анемометр, гирокомпас и ветрочет. Для измерения температуры воды так же, как и для воздуха, термометр и системы электронного картографирования. При том производилось взятие забортной воды пластмассовым ведром. Также температура воды сравнивалась с данными из машинного отделения. Там забор воды производился через ящики кингстона.
1.4.1. Анемометр ручной индукционный АРИ-49
Анемометр предназначен для измерения усредненного значения скорости ветра. Действие анемометра основано на измерении угловой скорости вращения трехчашечной метеорологической вертушки методом электронного индукционного тахометра.
Ветроприемником анемометра является вертушка, состоящая из трех чашек, жестко закрепленных во втулке, насаженной на ось, которая вращается в насыпных шарикоподшипниках. На нижнем конце оси жестко укреплена магнитная система, состоящая из постоянного магнита, магнитопровода и температурного компенсатора.
К нижней части корпуса анемометра прикреплена плата, на которой смонтирована индикаторная часть прибора, состоящая из оси с насаженным на нее металлическим колпачком, пружины спиральной и стрелки. Цилиндрическая часть колпачка находится в кольцевом зазоре между магнитом и магнитопроводом. Скорость ветра определяется по положению стрелки относительно шкалы, закрепленной на плате.
Прибор снабжен ручкой и специальной стойкой для закрепления анемометра.
Также в прибор вмонтированы две ножки-опоры.
Под действием воздушного потока вертушка всегда вращается в одну сторону. Вращаясь вместе с осью, магнитная система создает магнитное поле, вызывающие в металлическом колпачке вихревые токи, появляется вращающийся момент и поворачивает колпачок, что и показывает связь с ветром.
1.4.2. Термометр измерения морской (забортной) воды
Судовые термометры для забортной воды, трюмов и наружные предназначены для измерения температур на морских судах. Термометры градуированы в градусах Международной практической температурной шкалы, то есть в градусах Цельсия (°C). Баллоны термометров наполнены толуолом или ртутью.
Термометры имеют шкалу, изготовленную из молочного стекла. Термометры выполнены из термометрического стекла. Судовые термометры для забортной воды, трюмов и наружные изготавливаются в латунных оправах и без оправ – как запасные части к указанным термометрам.
Термометры изготовлены согласно требованиям нормы PN-85/M-53820. По желанию клиента на приобретённые термометры, за дополнительную плату, может быть выдано свидетельство контроля качества или свидетельство о калибровке лабораторией, имеющей аккредитацию PCA (сертификат PCA)
1.4.3. Барометр-анероид
Этот барометр является прибором для измерения атмосферного давления, в отличие от ртутного барометра, действующий без помощи жидкости.
Приёмной частью анероида служит цилиндрическая металлическая коробка с концентрически-гофрированными (для большей подвижности центра) основаниями, внутри которой создано разрежение (сильфон). При повышении атмосферного давления коробка сжимается и тянет прикреплённую к ней пружину (мембрану), а при понижении давления коробка раздувается, толкая пружину. Перемещение конца пружины через систему рычагов передаётся на стрелку, перемещающуюся по шкале. В последних конструкциях вместо пружины применяют более упругие коробки.
К шкале анероида может быть прикреплён дугообразный термометр-компенсатор, который служит для внесения поправки в показания анероида на температуру. Возможен другой вид температурного компенсатора, когда один из рычагов передающий движение от коробки к стрелке сделан из биметаллического сплава. Такая конструкция разработана и применяется французской фирмой NAUDET. Для получения истинного значения давления показания анероида нуждаются в поправках, которые определяются сравнением с ртутным барометром. Поправок к анероидам три:
- на шкалу – зависит от того, что анероид неодинаково реагирует на изменение давления в различных участках шкалы;
- на температуру – обусловлена зависимостью упругих свойств анероидной коробки и пружины от температуры;
- добавочная, обусловленная изменением упругих свойств коробки и пружины со временем.
Погрешность измерений анероида составляет 1-2,5 мбар. Вследствие своей портативности анероиды широко применяются в экспедициях и быту. Кроме того, анероиды используются также как высотомеры. В этом случае шкалу анероида градуируют в метрах.
Барометр-анероид - один из основных приборов, используемый метеорологами для составления прогнозов погоды на ближайшие дни, так как её изменение зависит от изменения атмосферного давления.
1.4.4. Барограф
Барограф или барометрограф – самопишущий прибор для непрерывной записи значений атмосферного давления (Рисунок 2). Применяется на метеорологических станциях, а также на самолётах и аэростатах для регистрации высоты (по изменению давления).
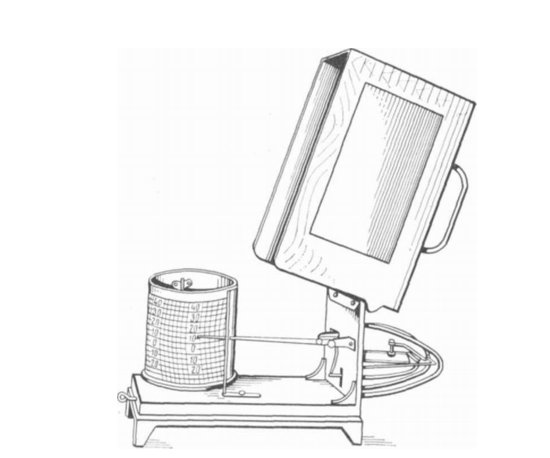
Рисунок 2 Барограф
В зависимости от принципа действия приёмной части барографы разделяют на анероидные барографы и ртутные – весовые и поплавковые. На ПУС «Мир» анероидный барограф, приёмная часть которого состоит из нескольких анероидных коробок, скреплённых вместе. При изменении атмосферного давления коробки сжимаются или растягиваются, в результате чего их крышка перемещается вверх или вниз. Это перемещение передаётся перу, которое чертит кривую на разграфлённой ленте. 1 мм записи по вертикали соответствует около 1 мбар (1 мбар=100 н/м2). По времени полного оборота барабана барографы подразделяются на суточные и недельные. Работа барографа контролируется сравнением его с ртутным барометром.
1.4.5. Ветрочет для вычисления направления и истинной скорости ветра по данным измерения скорости и направление кажущегося ветра
Ветрочет – прибор для графического определения на ходу корабля истинной скорости и направления ветра (Рисунок 3). С помощью анемометра и визуального наблюдения определяется кажущаяся скорость ветра и его направление, относительно судна. Для определения истинного характера этих параметров на ветрочете необходимо выставить две точки: ветровую и курсовую. Для этого необходимо подвести градусное деление подвижного круга, соответствующее направлению кажущегося ветра к стрелке- указателю Затем отложить от центра в направлении указателя его скорость в выбранном судоводителем масштабе, обозначив конец вектора точкой В. Подвести к указателю деление, соответствующее курсу судна и, отложив от центра круга в выбранном масштабе скорость судна, ставим вторую точку К. Совместив вращением круга обе поставленные точки по одной из вертикальных линий планшета, параллельной диаметру, проходящему через центр круга и указатель таким образом, чтобы точка К была выше точки В. Получится против стрелки-указателя направление истинного ветра, а расстояние между точками в выбранном масштабе будет равно его скорости.
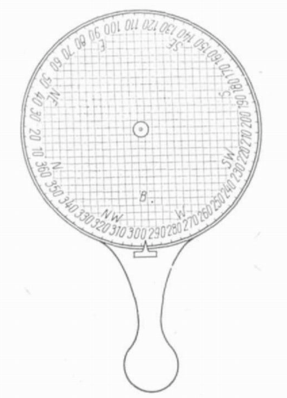
Рисунок 3 Ветрочет
1.4.6. Электронная Картографическая Навигационно-Информационная система Электронная картографическая навигационно-информационная система
(ЭКНИС) – компьютерная навигационная система на основе информации, которая соответствует требованиям Международной морской организации, обеспечивает безопасность судовождения и может служить альтернативой традиционным бумажным картам.
Компьютерная система отображает информацию из электронных навигационных карт, интегрирует её с данными системы глобального позиционирования GPS, данными радаров, систем автоматической идентификации судов.
Типы электронных картографических систем:
- ЭКНИС (ECDIS) – морская электронная картографическая навигационно- информационная система, удовлетворяющая требованиям Российского морского регистра судоходства («Правила по оборудованию морских судов») и международным требованиям (IEC-61174 Ed.3.0 −2008).
- СОЭНКИ – речная навигационная картографическая система, удовлетворяющая требованиям национального речного регистра («Правила классификации и постройки судов внутреннего плавания ч.4 п. 25.10» и РД 52-013-01 «Системы отображения электронных навигационных карт и информации для внутренних водных путей»). СОЭНКИ, имеющая свидетельства речного и морского регистров (удовлетворяющая требованиям, предъявляемым к ЭКНИС) предназначена для судов смешанного плавания.
- ЭКС (ECS) – электронная картографическая система, удовлетворяющая требованиям стандарта IEC-62376(2010)), предназначенная для использования на судах совместно с бумажными морскими навигационными картами, являющимися основными. Стандарт рассматривает три типа ЭКС (классы «А», «B» и «C») и определяет требования к ним. Выполнение системой требований указанных стандартов подтверждается
«Свидетельством о типовом одобрении», выдаваемым соответствующим классификационным обществом.
Важно: Система может считаться ЭКНИС или СОЭНКИ, если она удовлетворяет требованиям морского или речного регистра и на ней установлены откорректированные официальные морские навигационные электронные карты. Тогда по ней разрешается осуществлять официальное судовождение (то есть можно не вести текущую исполнительную прокладку по бумажной карте, а использовать электронную карту). Для ЭКС классов «А» и «B», стандарт IEC-62376(2010) допускает использование их в качестве основного навигационного средства с использованием неофициальных карт. ЭКС класса
«С» может использоваться только как вспомогательная информационная система.
Виды электронных карт:
Растровые карты (RNC) – это, по сути, сканированные копии бумажных карт,
«привязанные» к координатной сетке.
Векторные карты (ENC).
1.4.7. Приёмник службы НАВТЕКС
НАВТЕКС (англ. NAVTEX) международная автоматизированная система передачи навигационной и метеорологической информации и оповещения. В судоходной навигации служит для приема навигационной и метеорологической информации безопасности (англ. Maritime Safety Information) и служит компонентом Глобальной морской системы связи при бедствии и для обеспечения безопасности (ГМССБ) Международной морской организации в соответствии с конвенцией СОЛАС-74/88. Информация распространяется в текстовом режиме (режим узкополосного буквопечатания (УБПЧ)) в СВ-диапазоне на частоте 518 кГц (на английском языке), в других странах (кроме США), в дополнение к этой частоте может использоваться частота 490 кГц для передачи сообщений на национальных языках (в том числе на русском). В районе Суэцкого канала из-за сложных метеоусловий (близость пустынь Египта и Аравийского полуострова, которые формируют пылевые завесы, сложные для преодоления на частоте 518 кГц) используется дублирующая частота 4209,5 кГц.
Станции НАВТЕКС передают сообщения, которые собирают по районам навигационных предупреждений (NAVAREA).
Поверхность земного шара поделена на 22 района NAVAREA (от англ – Navigational Area). Каждой станции в районе предупреждения присвоена буква латинского алфавита от A до Z (в северном полушарии с севера на юг). Вещание станций в одном районе предупреждения ведётся последовательно, согласно расписанию. Дальность вещания станции составляет 200-600 морских миль. Всего насчитывается 153 действующих станций. Из них 10 расположены в России, две станции действуют в Украине (Черное море - Одесса, Азовское море - Бердянск) и одна в Эстонии (Таллин)
Сортировка станций в приемнике НАВТЕКС осуществляется как автоматически, так и вручную.
Виды сообщений:
| A | Навигационное предупреждение |
| B | Метеорологическое предупреждение |
| C | Ледовая сводка |
| D | Аварийно-спасательное сообщение, случай пиратства |
| E | Метеорологический прогноз |
| F | Информация для лоцманов |
| G | сообщение системы Decca |
| H | сообщение системы LORAN |
| I | сообщение системы Omega |
| J | Статус спутников GPS и ГЛОНАСС |
| K | Дополнение к «J» |
| L | Сообщение о потере буровых платформ |
| V | Подробное навигационное предупреждение,излучения и получения
отра анонсированное через A |
| W X Y | Тестовый режим |
| Z | Предупреждение отсутствует |
Структура сообщения:
Структура сообщения (Таблица 1) может отличаться от нижеприведённого примера, кроме стартового и заключительного кодов. Заключительный код может содержать также группу NNN это говорит о том, что принятое сообщение содержит слишком много ошибок (более 4 %) и в следующий раз будет принято повторно.
Таблица 1 Вид сообщения НАВТЕКС
| Сообщение | Пояснения |
| ZCZC LE05 031452 UTC MAR
ROGERLAMD RADIO WEATHER-FORECAST MELDUNG .... NNNN |
Стартовый код (ZCZC), Станция (L), Вид сообщения (E), Порядковый номер (05) 03 Марта 14:52 UTC
Название станции и вид сообщения Сообщение Заключительный код |
Техника:
Сообщения NAVTEX передаются наземными станциями в режиме FEC (Телекс- англ. Forward Error Correction).
Терминалы:
Принимающая станция состоит из активной антенны и приёмника с устройством вывода информации. Обычно применяются приёмники с дисплеем и встроенным печатным устройством с использованием термобумаги. В последнее время получили распространение более дешевые терминалы с жидкокристаллическим дисплеем, оснащённые разъёмом RS-232, или же антенны, подключаемые через USB к персональному компьютеру с соответствующим программным обеспечением.
С помощью бытового радиоприёмника и программы NAVTEX Decoder 1 возможен приём NAVTEX-сообщений без вышеуказанных терминалов.
1.4.8. Судовая радиолокационная станция
Радиолокация – метод обнаружения в пространстве различных объектов посредством излучения и приема отраженных радиоволн. Этот метод реализуется в радиолокационных станциях (РЛС), действие которых основано на использовании явления отражения радиоволн от различных объектов, расположенных на пути их распространения.
Судовая РЛС – это установленная на судне РЛС, предназначенная для обнаружения и последующего наблюдения за берегом, судами, льдами и другими объектами, представляющими интерес для судоводителя.
Судовая навигационная РЛС (НРЛС) обеспечивает возможность измерять расстояния, пеленги и курсовые углы на объекты и применяется для определения места судна в географической и относительной системах координат при самых разнообразных условиях плавания.
Навигационные радиолокационные станции представляют собой импульсные радиотехнические средства, работа которых основана на использовании зависимости между временем распространения радиосигнала и навигационным параметром. Такая РЛС периодически излучает кратковременные импульсы колебаний СВЧ, а в промежутке между излучениями принимает отраженные от объектов импульсные сигналы, Основной недостаток радиолокационного метода пеленгования — относительно невысокая точность определения направления на объект.
РЛС применяются автономно или совместно с береговыми устройствами - радиолокационными отражателями и радиолокационными маяками-ответчиками, находящимися в радионавигационных точках.
Определение места судна относительно отражающих объектов производится по пеленгу и расстоянию до них. Поэтому навигационные РЛС являются дальномерно- азимутальными радиотехническими средствами.
Возможность определения местоположения судна при плавании в сложных условиях (малая видимость, наличие навигационных опасностей, узкостей и др.), наглядность отображения внешней обстановки в районе плавания делают РЛС одним из основных технических средств судовождения.
РЛС позволяет решать следующие задачи:
- определение координат места судна по точечным и пространственным ориентирам путем измерения радиолокационных пеленгов и дистанций;
- определение места судна по точечным и пространственным ориентирам путем совмещения равномасштабных изображений береговой линии или отражающих горизонталей, наблюдаемых на индикаторе кругового обзора РЛС и на карте;
- опознание побережья и глазомерная ориентировка при плавании в стесненных условиях;
- обнаружение надводных навигационных опасностей, плавучего льда, ливневых облаков и снежных зарядов;
- обнаружение и наблюдение встречных судов, определение элементов их движения для оценки ситуации недопустимого сближения и решения задачи безопасного расхождения с ними;
- определение относительного места судна при плавании в караванах;
- определение маневренных элементов судна.
Навигационные РЛС, входящие в состав автоматизированных навигационных комплексов или в интегрированное оборудование ходового мостика, или сопрягаемые с системами автоматической радиолокационной прокладки, позволяют, кроме того:
- автоматизировать процесс прокладки линий относительного движения встречных судов, выполнять расчеты элементов их движения и маневра расхождения с ними;
- осуществлять обсервационную прокладку пути судна при плавании в стесненных условиях и в прибрежной зоне;
- непосредственно измерять элементы суммарного сноса судна.
К недостаткам навигационных РЛС, влияющим на безопасность судовождения, относятся:
- наличие теневых секторов и минимальной дистанции, в пределах которых объекты не обнаруживаются;
- специфическое искажение объектов на экране РЛС относительно их изображения на морской навигационной карте и затруднение при их опознавании;
- ограниченность дистанций обнаружения объектов географическим фактором радиолокационной видимости, зависимость от отражающих способностей и размеров объектов, а также зависимость возможности обнаружения от маскирующего влияния осадков ливневого характера;
- относительно низкая точность радиолокационного пеленгования.
1.4.9. Судовой комбинированный приёмоиндикатор глобальных навигационных спутниковых систем (ГНСС)
Приёмоиндикатор ГНСС предназначен для использования на морских и речных судах для круглосуточного всепогодного определения навигационных параметров движения по открытым для потребителей радиосигналам спутниковых навигационных систем ГЛОНАСС и GPS.
Приёмоиндикатор ГНСС вырабатывает следующие навигационные параметры:
- текущие координаты судна в выбранной пользователем системе координат (с оценкой их точности),
- высота над геоидом,
- текущее время и дату,
- скорость судна относительно грунта,
- путевой угол.
Указанные параметры отображаются в нескольких формулярах, которые переключаются пользователем простым поворотом ручки селектора. Указанные формуляры разрабатывались таким образом, чтобы обеспечить максимальную информативность и удобство.
Судовой приемоиндикатор ГНСС обеспечивает режим движения судна по заданному маршрутному плану. Данный режим позволяет задавать до 600 путевых точек и вырабатывать параметры движения судна по маршруту:
- пеленг на заданную точку,
- отклонение от заданного направления,
- вход судна в зону путевой точки или выход из нее.
Приемник имеет так же встроенную функцию МОВ («человек за бортом») с активизацией от кнопки «MOB». Активизация данной функции позволяет судоводителю осуществлять слежение за маневром относительно предполагаемой точки обнаружения человека за бортом.
В целях повышения точности выработки навигационных параметров приёмоиндикатор Фарватер предусматривает приём и учёт в решении поправок широкозонных дифференциальных подсистем SBAS (WAAS, EGNOS, MSAS) и контрольно-корректирующих станций DGPS и ДГЛОНАСС в соответствии с рекомендациями RTCM SC-104 .
1.4.10. Судовая метеостанция
Судовая погодная станция применяется на судах любых типов с целью получения и анализом объективной метеорологической информации. Сбор погодных данных в условиях моря имеет огромное значение для оптимального выбора маршрута движения и обеспечения безопасности судна в целом.
Набор метеоданных состоит из множества параметров, анализируя которые, можно с той или иной достоверностью предсказывать погоду на ближайшее время. Основные параметры, на основании которых можно делать какие-либо выводы – это атмосферное давление, температура воздуха, относительная влажность, интенсивность осадков, скорость и направление ветра.
При определении ветра выделяют так называемые истинный, курсовой и вымпельный – сумма истинного и курсового, направление которого указывает судовой вымпел.
Для оценки всех факторов, влияющих на погоду, судовые метеостанцию оснащаются всевозможными видами датчиков, ответственных за сбор информации, в том числе комбинированных. Метеорологические станции можно охарактеризовать количеством измеряемых параметров, чувствительностью, аналитикой. Мониторинг погодных условий позволяет следить за образованием кучевых облаков, являющихся предвестниками значительных осадков, в том числе ливневых штормов, представляющих наибольшую опасность для судов. Для повышения качества прогнозирования погодная станция может сканировать структуру облаков, определять размере частиц осадков и их тип.
Современные погодные станции представляют собой комплексные устройства, совмещающие измерительную мощь с навигационной информацией о местоположении и курсе, позволяя оценивать ситуацию применительно к маршруту следования и предлагать его изменения в соответствии с полученными прогнозами. Метеостанции могут взаимодействовать с другими судовым оборудованием через различные интерфейсы, использовать протоколы передачи информации.
1.4.11 Факсимильный приемник карт погоды FX-330
Отличительные особенности:
8-дюймовая стационарная термоголовка предназначена для работы с термочувствительной бумагой, не имеющей запаха и вредных выделений и обеспечивает продолжительный срок эксплуатации печатающего устройства.
Помещен в компактный, прочный пластиковый корпус для вертикального крепления к переборке судна.
Приемник с синтезатором частот перекрывает диапазон частот в СВ и КВ диапазоне без дополнительной настройки на передающую станцию.
ВЧ- тракт имеет широкий динамический диапазон и содержит оптимизированный полосовой фильтр для защиты от различных типов помех.
Имеет все запрограммированные действующие частоты ВМО.
Имеет 200 запрограммированных пользовательских каналов памяти, изменяемых по желанию оператора.
Обеспечивает автоматический запуск и остановку, фазировку, установку плотности линии, и скорости развертки в без операторном режиме.
Для экономии термочувствительной бумаги предусмотрена функция таймера для автоматического приема необходимой факсимильной карты погоды.
Активная штыревая антенна с высоким усилением поставляется в стандартном варианте и предназначена для установки в местах с ограниченным пространством. с
Технические характеристики:
- диапазон частот 110-160 кГц (ДВ), 2-27 МГц(КВ)
- чувствительность: лучше, чем 10 мВ (ДВ), 2 мВ (КВ)
- принимаемый класс излучения: F3C и J3C
- тип бумаги: термочувствительная
- скорость развертки: 60, 90, 120, 240 строк/мин, автоустановка
- стандарт плотности линии (IOC): 576 и 288, автовыбор
- старт/стоп и управление фазировкой: ручное и автоматическое
- запрограммированные частоты: 165 ДВ и КВ частоты
- запрограммированные каналы пользователя: 200
- программирование таймера: 2w10 старт/стоп, система сканирования сигналов передатчиков/24 часа
- требования по электропитанию: 11-36 B DC, 4А/1.2А @ 12 В (печать/дежурный режим)